The Center for Sustainable Mobility (CSM) conducts research relevant to society's transportation mobility, energy, environmental, and safety needs. The center translates the results of research into realistic and workable applications, creates and provides tools needed to apply developed knowledge and processes, and educates qualified engineers to meet today's transportation demands and tomorrow's transportation challenges in the following areas: transportation network control; large-scale transportation system modeling; traffic state prediction using large data and artificial intelligence techniques; transit bus real-time routing and scheduling; vehicle energy and environmental modeling; connected and automated vehicle control; and eco-transportation applications.
- Large-scale Multi-modal Transportation and Communication Modeling & Analysis
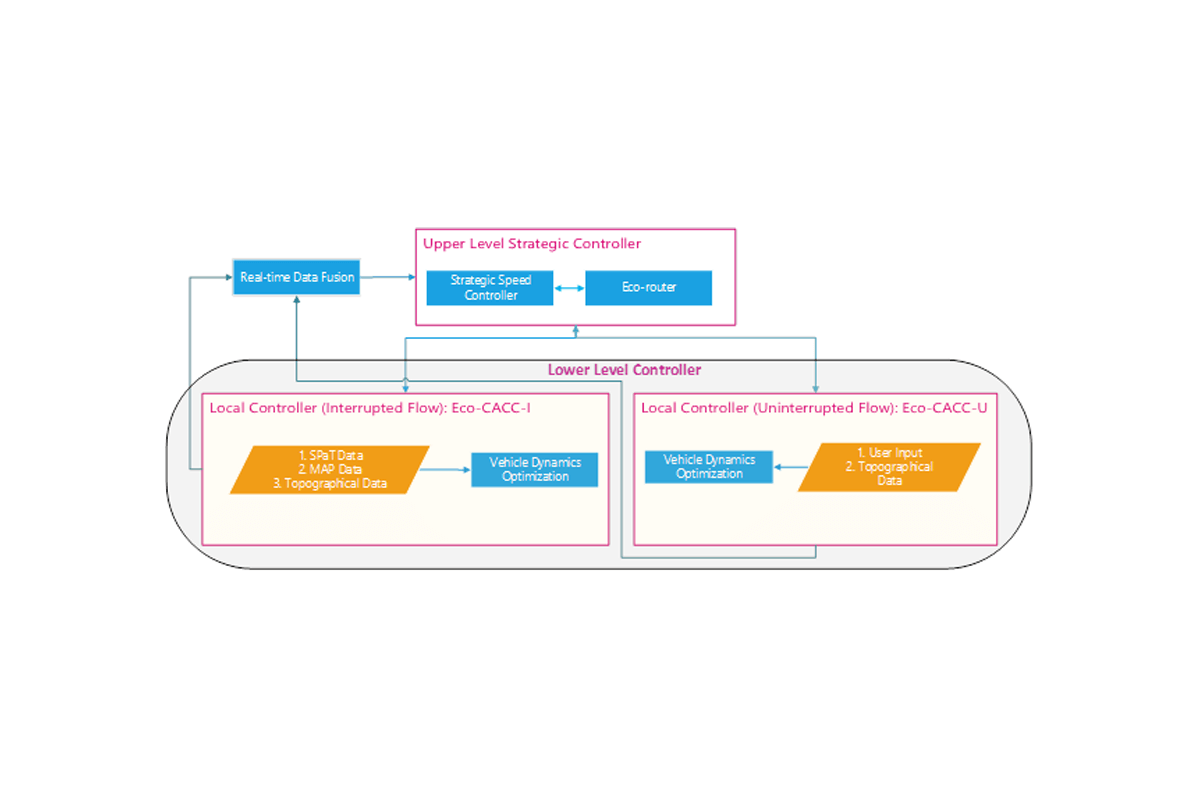
- Connected and Automated Vehicles
- Traffic Prediction and Control
- Emerging Transportation Modes
- Multi-modal Energy and Emission Modeling & Optimization
- Transportation System Safety Modeling & Assessment
- Application of Artificial Intelligence in Transportation


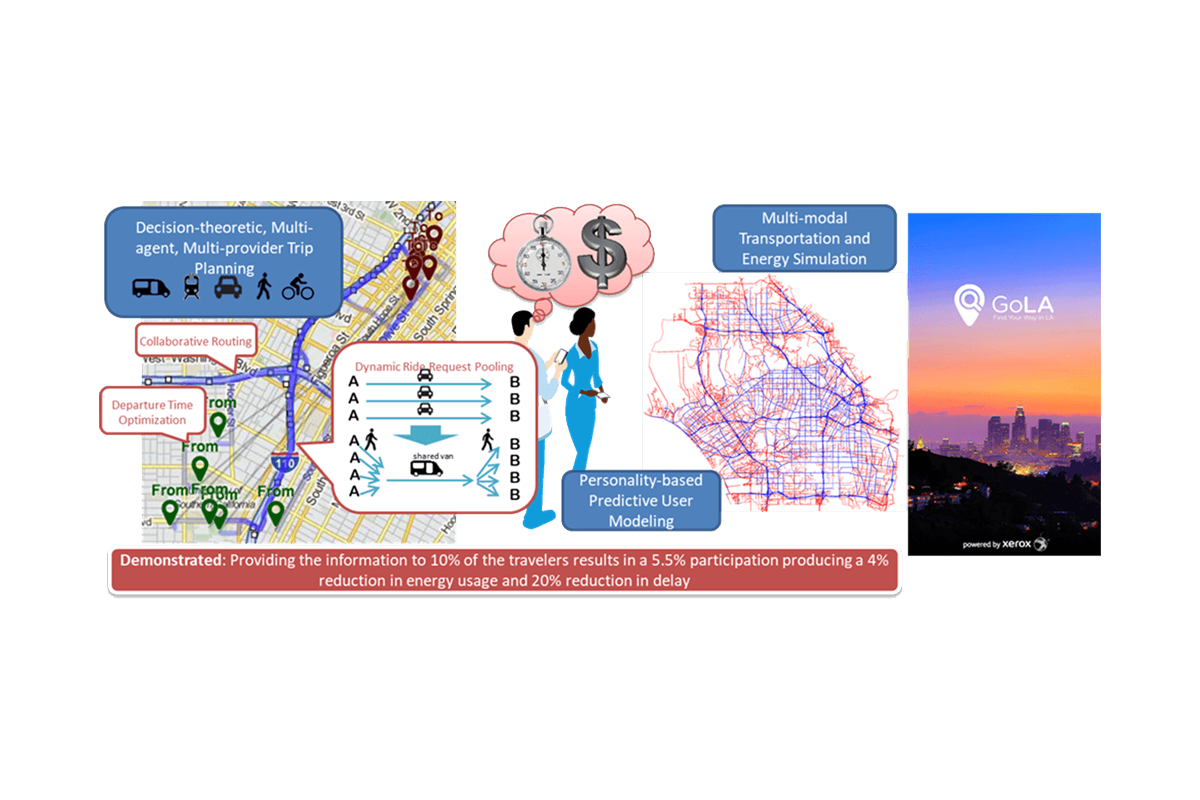
- INDUSTRY BEST PRACTICES: CSM continues to advance the industry's best practices in the area of multi-modal large-scale transportation system modeling. The INTEGRATION software, which is continuously being developed by CSM, has been used in a number of high-impact large-scale modeling efforts, including: the evaluation of the first dynamic route guidance system, TravTek (a collaborative effort with SAIC, FHWA, AAA); the network-wide evaluation of the Seattle Wide-area Field Operational Test (SWIFT); the modeling of the Greater Salt Lake City area in preparation for the 2002 Winter Olympic Games (a joint effort with TransCore and the Utah Department of Transportation); the modeling of sections of Beijing in preparation for the 2008 Summer Olympic Games (in collaboration with Jiaotong University); a collaborative effort with the Palo Alto Research Center (PARC) to develop and evaluate the performance of alternative traveler incentive strategies to reduce network-wide energy consumption in the Greater Los Angeles area (a TransNET/U.S. Department of Energy (DOE) Advanced Research Projects Agency-Energy (ARPA-E) project), and the development and testing of an Eco-Cooperative Automated Control (Eco-CAC) system (Office of Energy Efficiency and Renewable Energy (EERE), Vehicle Technologies Office, Energy Efficient Mobility Systems Program under award number DE-EE0008209).
- INNOVATION: CSM has conducted fundamental research and published over 450 peer-reviewed papers in the areas of transportation system optimization, traffic and vehicle control, transportation system modeling, connected and automated vehicle control, and assessing the impact of intelligent transportation and vehicle systems on transportation system efficiency, safety, energy consumption, and vehicle emissions. In the area of transportation system optimization, CSM has developed various traffic signal control systems, dynamic routing systems, ramp metering controllers, and speed harmonization controllers. In the area of vehicle control, CSM has developed various cooperative adaptive cruise control systems. In the area of transportation system modeling, CSM develops the INTEGRATION microscopic traffic assignment and simulation software (https://sites.google.com/a/vt.edu/hrakha/software), an internationally recognized transportation modeling tool. CSM has developed various vehicle energy and fuel consumption models that are used world-wide to assess the energy and environmental impacts of Intelligent Transportation System (ITS) applications and emerging Connected Automated Vehicle (CAV) systems. The models include the VT-Micro, VT-Meso, the Virginia Tech Comprehensive Fuel consumption Model (VT-CPFM), the VT-CPEM, and the VT-CPHEM models. In addition, CSM developed various vehicle- and infrastructure-based optimization approaches that minimize traveler delay and vehicle energy consumption.
- OUTREACH: Our center continues to present at various scientific conferences, publish in refereed journals and develop and teach undergraduate and graduate courses at Virginia Tech.
- PROTECTING THE ENVIRONMENT: CSM research includes a focus on sustainably reducing fuel/energy consumption by integrating vehicle control strategies with connected vehicle technologies. For example, CSM researchers are assessing important variables in freight rail that can lead to emissions reductions, and have also created a calculator to determine the energy cost differences between owning an electric vehicle and a gasoline vehicle.
- Du J., Rakha H.A., Elbery A., and Klenk M. (2018), “Microscopic Simulation and Calibration of a Large-Scale Metropolitan Network: Issues and Proposed Solutions,” 97th Transportation Research Board Annual Meeting, Washington DC, January 7-11. [Paper # 18-02086].
- Elbery A.* and Rakha H.A. (2021), “VANET Communication and Mobility Sustainability: Interactions and Mutual Impacts in Vehicular Environment,” in Connected and Autonomous Vehicles in Smart Cities. https://doi.org/10.1201/9780429329401.
- Elbery A., Bichiou Y., Rakha H.A., Du J., Dvorak F., and Klenk M. (2018), “City-level Agent-based Multi-modal Modeling of Transportation Networks: Model Development and Preliminary Testing,” in Smart Cities, Green Technologies, and Intelligent Transport Systems. https://doi.org/10.1007/978-3-030-26633-2_14.
- Rakha H.A., Elbery A., Du J., Bichiou Y., Wang J.*, Dvorak F. and Klenk M. (2017), “Developing a Multi-scale and Multi-modal Agent-based Modeling Framework for Assessing Network-wide Energy/Fuel Consumption Impacts of Travel Incentive Strategies,” INFORMS Conference, Houston, Oct. 22-25.
- Elbery A. and Rakha H.A. (2019), “City-wide Eco-routing Navigation Considering Vehicular Communication Impacts,” Sensors, vol. 19, no. 2, pp. 290. https://doi.org/10.3390/s19020290.
- Farag, M.M.G.*; Rakha, H.A.; Mazied, E.A.; Rao, J. INTEGRATION Large-Scale Modeling Framework of Direct Cellular Vehicle-to-All (C-V2X) Applications. Sensors 2021, 21, 2127. https://doi.org/10.3390/s21062127.
- Abdelghaffar H. and Rakha H.A. (2019), “A Novel Decentralized Game-theoretic Adaptive Traffic Signal Controller: Large-scale Testing,” Sensors, Vol. 19(10), 2282. https://doi.org/10.3390/s19102282.
- Abdelghaffar H. and Rakha H.A. (2019), “Development and Testing of a Novel Game Theoretic De-centralized Traffic Signal Controller,” IEEE Transactions on Intelligent Transportation Systems. https://doi.org/10.1109/TITS.2019.2955918.
- Ahn K*, Bichiou Y*, Farag M*, Rakha HA. Multi-objective Eco-Routing Model Development and Evaluation for Battery Electric Vehicles. Transportation Research Record. 2021;2675(12):867-879. doi:10.1177/03611981211031529.
- Du, J.* and Rakha, H.A. Constructing a Network Fundamental Diagram using a Sample of Connected Vehicles and Stationary Sensors, Transportation Research Interdisciplinary Perspectives, Volume 12, 2021, 100471, ISSN 2590-1982, https://doi.org/10.1016/j.trip.2021.100471.
- Yang H. and Rakha H. (2017), “Feedback Control Speed Harmonization Algorithm: Methodology and Preliminary Testing,” Transportation Research Part C, Vol. 81, pp. 209-226. https://doi.org/10.1016/j.trc.2017.06.002.
- Chen, H.; Rakha, H.A. Developing and Field Testing a Green Light Optimal Speed Advisory System for Buses. Energies 2022, 15, 1491. https://doi.org/10.3390/en15041491.
- Dubljevic V, List G, Milojevich J, Ajmeri N, Bauer WA, Singh MP, Bardaka E, Birkland TA, Edwards C, Mayer RC, Muntean I, Powers TM, Rakha HA, Ricks VA, Samandar MS (2021) Toward a rational and ethical sociotechnical system of autonomous vehicles: A novel application of multi-criteria decision analysis. PLOS ONE 16(8): e0256224. https://doi.org/10.1371/journal.pone.0256224.
- Hussein, A. and Rakha, H.A. Vehicle Platooning Impact on Drag Coefficients and Energy/Fuel Saving Implications, IEEE Transactions on Vehicular Technology, vol. 71, no. 2, pp. 1199-1208, Feb. 2022, doi: 10.1109/TVT.2021.3131305.
- Ashqar, H.I.*; Elhenawy, M.*; Rakha, H.A.; and House, L. Quality of Service Measure for Bike Sharing Systems, IEEE Transactions on Intelligent Transportation Systems 2022, doi: 10.1109/TITS.2022.3145669.
- Du, J.*, Rakha, H.A., and Breuer, H. An In-Depth Spatiotemporal Analysis of Ride-Hailing Travel: The Chicago Case Study, Case Studies on Transport Policy, 2021. doi: 10.1016/j.cstp.2021.11.010.
- Elhenawy, M.*, Rakha, H.A., Bichiou, Y.*, Masoud, M., Glaser, S., Pinnow, J., and Stohy, A. A Feasible Solution for Rebalancing Large-scale Bike Sharing Systems, Sustainability, 2021. Doi: 10.3390/su132313433.
- Ahn, K.; Rakha, H.A. Developing a Hydrogen Fuel Cell Vehicle (HFCV) Energy Consumption Model for Transportation Applications. Energies 2022, 15, 529. https://doi.org/10.3390/en15020529.
- Ahn K. and Rakha H.A. (2019), “A Simple Hybrid Electric Vehicle Fuel Consumption Model for Transportation Applications,” Electric and Hybrid Vehicles, ISBN 978-1-83880-070-3. https://doi.org/10.5772/intechopen.89055.
- Fiori C., Ahn K., and Rakha H.A. (2016), "Power-based Electric Vehicle Energy Consumption Model: Model Development and Validation," Journal of Applied Energy, Vol. 168, pp. 257-268. http://dx.doi.org/10.1016/j.apenergy.2016.01.097.
- Fiori C., Ahn K., and Rakha H.A. (2018), “Microscopic Series Plug-in Hybrid Electric Vehicle Energy Consumption Model: Model Development and Validation,” Transportation Research Part D: Transport and Environment, Vol. 63, August 2018, pp. 175–185. https://doi.org/10.1016/j.trd.2018.04.022.
- Wang J. and Rakha H. (2017), “Electric Train Energy Consumption Modeling,” Journal of Applied Energy, Vol. 193, pp. 346-355. https://doi.org/10.1016/j.apenergy.2017.02.058.
- Amer, A., Rakha H., and El-Shawarby I. (2012), “Novel Stochastic Procedure for Designing Yellow Intervals at Signalized Intersections,” Journal of Transportation Engineering, Vol. 138(6). https://doi.org/10.1061/(ASCE)TE.1943-5436.0000381.
- Avgoustis A., Rakha H., and Van Aerde M. (2004), Framework for Estimating Network-wide Safety Impacts of Intelligent Transportation Systems, Intelligent Transportation Systems Safety and Security Conference, Miami, 24-25 March.
- Donoughe, K., Rakha, H., Swanson, W., Park, S., and Bryson, J. (2011) “Development of Hardware-in-the-Loop Test Bed for Evaluating Truck Safety Systems,” Transportation Research Record: Journal of the Transportation Research Board, No. 2265, pp. 43-53. https://doi.org/10.3141/2265-05.
- Osman O. and Rakha H.A. (2020), "Characterization of Drivers' Engagement in Secondary Tasks: Application of Deep Learning for Data-Driven In-Vehicle Systems", TRR. https://doi.org/10.1177/0361198120926507.
- Rakha H., Fitch G., Arafeh M., Blanco M., and Hanowski R. (2010), “Evaluation of Safety Benefits from a Heavy-Vehicle Forward Collision Warning System,” Transportation Research Record: Journal of the Transportation Research Board, No. 2194, pp. 44-54. https://doi.org/10.3141/2194-06.
- Van Aerde M. and Rakha H. (1999), A Framework for the Evaluation of System Safety Benefits of Intelligent Cruise Control Systems, Intelligent Transportation Systems Journal, Vol. 5, pp. 163-189. https://doi-org.ezproxy.lib.vt.edu/10.1080/10248079908903763.